
Underwater vision group
Abstract
If you want to investigate or excavate the remains at the bottom of Lake Biwa with underwater robots, it is difficult to observe objects with the normal camera because of sored mad. Therefore, we study to observe the objects at the bottom of Lake Biwa by image processing with Professor Kenichi Yano, Faculty of Literature and Professor Sadao Kawamura, Department of Robotics, Faculty of Science and Engineering of Robotics, Ritsumeikan Univ. This research is expected to contribute that we can observe not only remains but also so big relics that they cannot be salvaged with the robot. So we may be able to discover something of historical and cultural values. We expect that the secondary results of this research will make any technological interests in computer vision.
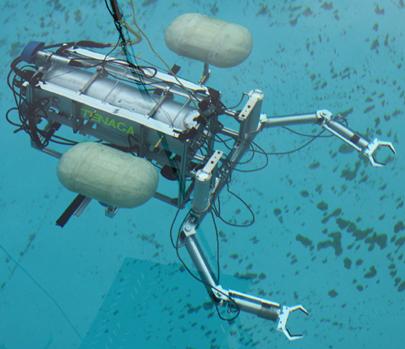
Kawamura lab's robot(http://www.ritsumei.ac.jp/se/~kawamura/)

We experiment with aquarium. In the future, we will experiment at the installation Kawamura lab has.
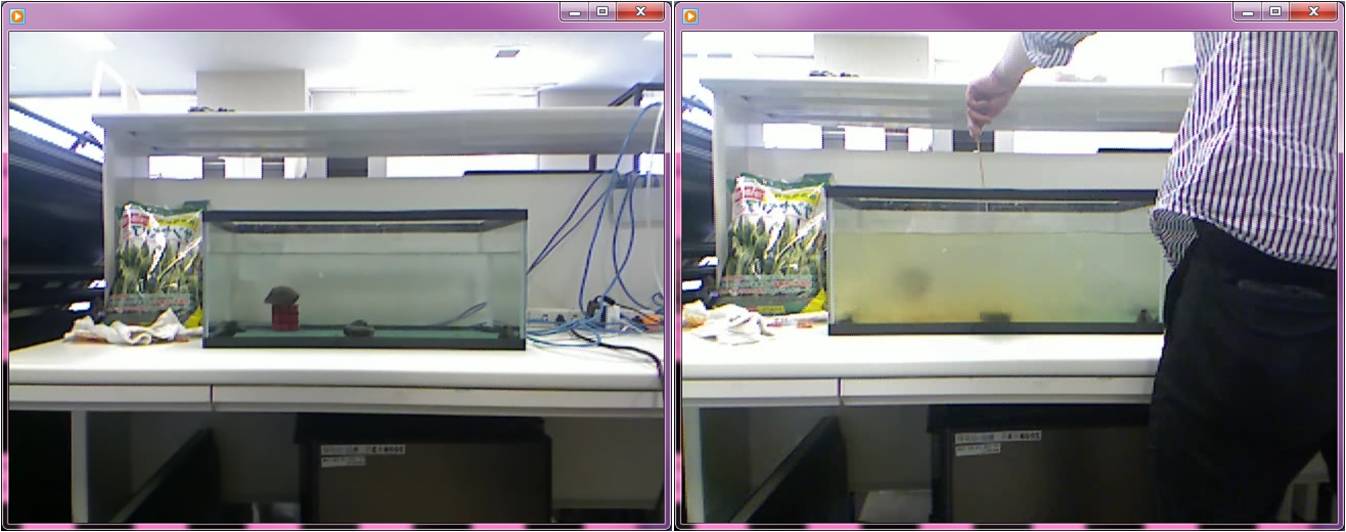
Now, we are investigating range data acquired by using Kinect sensor under the water using small aquarium. Currently we got some bad results because of perturbations by reflection at water surface and aquarium's glass walls, and sunlight. We now consider to use polarizing plate to avoid the perturbations.

We will study data with also Kinect v2, stereo camera, and so on.
Member
B4 Taro Kajiki ( kajiki [at] i.ci.ritsumei.ac.jp )
 Hand Shape Pag...
Hand Shape Pag...