Autonomous mobile robot group [poster](in Japanese)
Background and subject
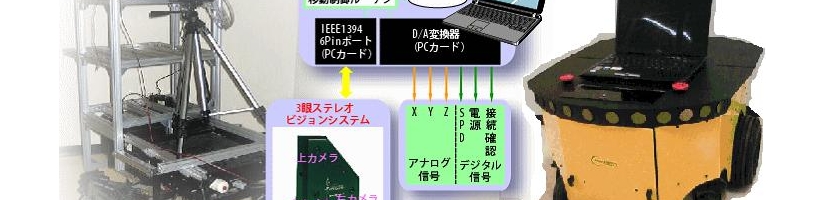
The group researches a mobile robot that grasps surrounding environment and moves without collision by autonomous control. It is developed on the assumption that it works on domestic environment. We use a mobile robot equipped with a stereo camera and a PC to recognize environment and control motion.
Researches
The group researches map generation with trinocular stereo vision, self-localization with a feature map and a monocular camera and autonomous movement where a mobile robot moves to a goal without collisions.
By using both of vertical and horizontal pairs, trinocular stereo vision makes less wrong correspondences on stereo-matching than binocular. On the other hand, monocular vision requires less cost than vision with multiple cameras. By utilizing sonar on autonomous movement, collisions with unexpected obstacles can be avoided.
[1]Obstacle mapping based on disparity for autonomous mobile robot
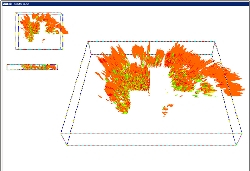
In this research, a robot first generates a three-dimensional map
representing likelihood that an obstacle occupies each small
region. Then, the robot repeats movement, self-localization and
update of the obstacle map.
By updating the map, the robot can select safer path.
[2]Mapping based on a laser range finder
In this research, a robot generates a map from surrounding world
information obtained by laser range finder. It also uses its location
from an encoder of the mobile robot. This method can generate a map
faster than the above method of mapping with disparity.
The research aims to make a robot safely move to a goal by repeating
self-localization with the map.

Previous researches
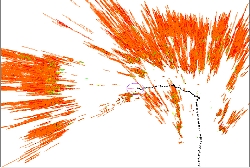
[3]Autonomous control for reaching a goal with avoiding obstacleIn this research, we try to calculate a good path to a goal from a map, a current position and direction of a robot, and the position of the goal. First, possible partial paths are determined by extracting passable areas and thinning them. And then, the shortest path is determined by the Dijkstra's algorithm.
We use Astolfi's discontinuous feedback control to move a robot smoothly to a goal position and direction without sharp turns. When the robot finds an obstacle with a sonar, it performs easy avoiding action.
[4]Mapping with trinocular vision and navigation with monocular vision

This research consists of two types of robots with different roles.
The one is a mapping robot, which generates a precise initial map with
trinocular vision. The other is a working robot, which moves with
monocular vision and provides some services at low cost.
The mapping robot investigates unknown environment by manual guidance and finds landmarks. Then, the robot generates a precise map by using the landmarks. By matching the landmarks on the map and a scene captured by monocular camera, The working robot can accurately estimate its location and go to a goal.
Member
B4 Tatsuya Yatsuduka ( yatsuduka [at] i.ci.ritsumei.ac.jp )
B4 Subaru Nishida ( nishida [at] i.ci.ritsumei.ac.jp )
 Sign Langu...
Sign Langu...