
インタラクティブビジョングループ
背景と目的
 高齢者や体の不自由な人のために介護ロボットによって冷蔵庫の中から食品を運ぶサービスの実現です。そのために、必要な食品の名前や位置の情報を認識して管理することを目的としています。
高齢者や体の不自由な人のために介護ロボットによって冷蔵庫の中から食品を運ぶサービスの実現です。そのために、必要な食品の名前や位置の情報を認識して管理することを目的としています。
研究内容
[1]サービスロボットのための物体認識に関する研究
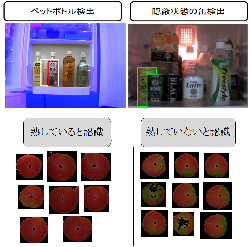
ユーザーが求めている食品が冷蔵庫内のどこに存在するのかを検出することを目的としています。物体の色や形などの特徴をあらかじめ登録させておき、その情報を用いて冷蔵庫内から対象物体の検出を行います。照明状況などの変化が生じたり、対象物体の一部が隠蔽されている等の状況下でもロバストに認識を行うことを課題としています。果物や野菜などの熟し具合を認識させ、ユーザーにとって最適な物をリコメンドさせることや、ステレオカメラから得られる距離情報を利用してより正確な認識を行わせる研究も行っています。
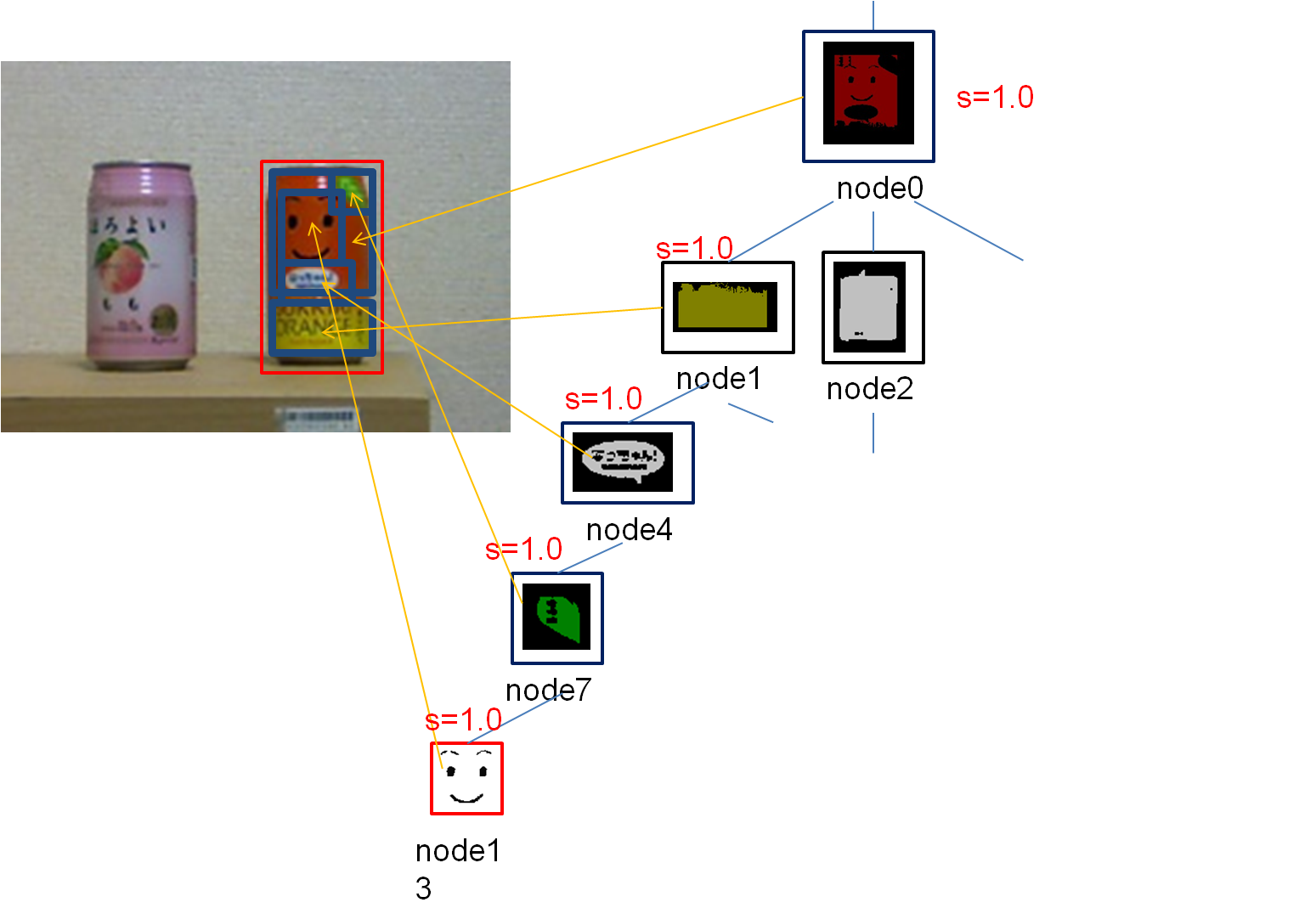
隠蔽された物体の認識について

冷蔵庫内では、認識対象の物体が他の物体によって隠蔽されている状況が考えられます。認識対象が隠蔽されている状況下でも、一部が見えていれば認識できるシステムを目指しています。 |

|
| TREE | RELATION |
|
|
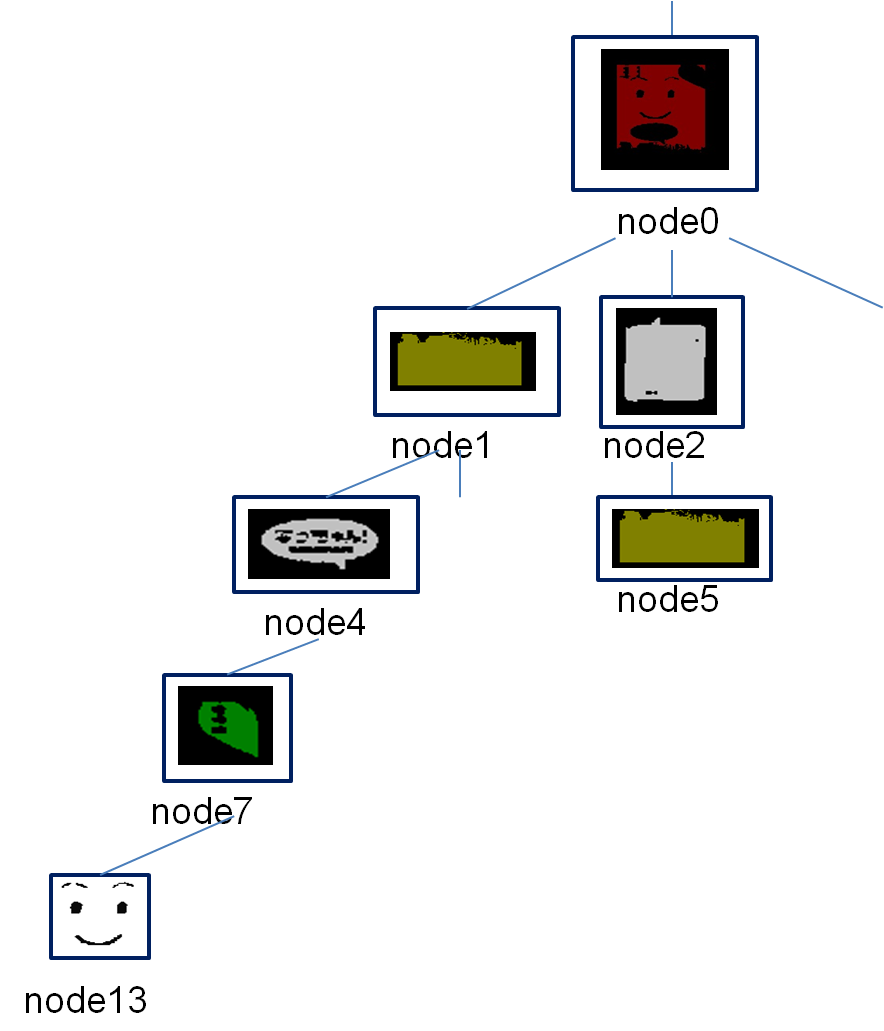
| 似た特徴を持つ物同士で様々な見え方を記述し、 どの向きからでも認識出来るようにします。 | 物体の特徴間の位置関係の記述 |
[2]冷蔵庫モニターシステム
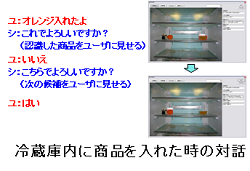
冷蔵庫モニターシステムはサービスロボットのために食品の管理とユーザとの対話をする機能を行います。食品を冷蔵庫に入れた際に、その位置と食品名を記憶しておき、冷蔵庫内に何があるのかを管理します。食品を入れた時に、背景差分法を用いて食品情報を登録しますが、冷蔵庫の板に映りこみが生じ、差分がうまくとれなくなる場合があります。現在は映りこみ領域を特定することで、背景差分をうまく取ることを行っています。
 映りこみ領域を特定について
映りこみ領域を特定について
冷蔵庫内を撮影すると、ガラス板に認識対象の物体が映り込んでしまう状況があります。その映り込みの部分だけを特定して、認識物体だけを認識できるシステムの開発を行なっています。このシステムは鏡面反射や透過光などの情報を基に映り込み部分を特定しようとしています.また、修正しきれない箇所はユーザとの会話による音声認識によって修正することを試みています。
メンバー
B5 上間 圭祐 ( uema [at] i.ci.ritsumei.ac.jp )
B4 西田 昴 ( nishida [at] i.ci.ritsumei.ac.jp )
B4 平井 裕麻 ( yhirai [at] i.ci.ritsumei.ac.jp )
B4 福原 宏弥 ( fukuhara [at] i.ci.ritsumei.ac.jp )
B4 八塚 達哉 ( yatsuduka [at] i.ci.ritsumei.ac.jp )
 Mobile Rob...
Mobile Rob...