
ヒューマノイドロボットグループ
背景と目的
 2000年度にHONDAが発表した「ASIMO」をはじめとして、近年、ヒューマノイド型ロボットの研究が盛んに行われています。ヒューマノイド型ロボットのような多リンク機構のロボットは移動する空間の幅や高さに制約がある場合でも、多数の自由度を利用して、くぐったり跨いだりといった動作が可能であり、それによって行動範囲を広げることができます。そのため、将来労働力の不足が問題となっている日本において、マルチな活動範囲をもつヒューマノイド型ロボットへの期待は高まっています。
2000年度にHONDAが発表した「ASIMO」をはじめとして、近年、ヒューマノイド型ロボットの研究が盛んに行われています。ヒューマノイド型ロボットのような多リンク機構のロボットは移動する空間の幅や高さに制約がある場合でも、多数の自由度を利用して、くぐったり跨いだりといった動作が可能であり、それによって行動範囲を広げることができます。そのため、将来労働力の不足が問題となっている日本において、マルチな活動範囲をもつヒューマノイド型ロボットへの期待は高まっています。
そこで本研究では、小型ヒューマノイドロボットを用いて、外の環境を認識し自律的に行動できるヒューマノイド型ロボットの開発を目的としています。
研究内容
・オプティカルフローと加速度センサ情報の相補的統合による歩行ロボットの注視制御
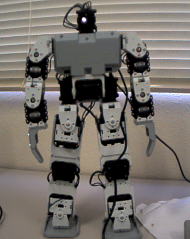
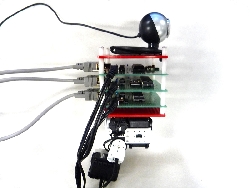 本研究では、歩行ロボットの動作時に生じる揺れを軽減し、視覚情報の安定化を実現させるシステムの構築を目標としています。そのために、右図のような単眼カメラと6軸加速度検出装置を搭載した3自由度首振りロボットに注視制御を行わせるシステムを開発しました。
本研究では、歩行ロボットの動作時に生じる揺れを軽減し、視覚情報の安定化を実現させるシステムの構築を目標としています。そのために、右図のような単眼カメラと6軸加速度検出装置を搭載した3自由度首振りロボットに注視制御を行わせるシステムを開発しました。
・オプティカルフローを用いた注視制御
画像中の特徴点の動ベクトル(オプティカルフロー)を用いた注視制御は、正確に目標の位置を検出することができます。しかし、画像情報の更新は毎秒30フレームと遅いため、急な動きに対応できないという欠点をもっています。(下の図が実験風景と急な動きに変化したためトラッキングが失敗した例です。)
・加速度センサ情報を用いた注視制御
加速度センサ情報(3軸加速度+3軸角速度)を用いた注視制御は、目標との相対位置関係が分からないという欠点をもっている代わりに、毎秒250回と高速に更新されます。また、自身の姿勢も画像情報より正確に知ることができます。
・オプティカルフローと加速度センサ情報の相補的統合による注視制御
双方の問題を解決する策として、普段は高速で更新される加速度センサ情報を用いて注視制御を行い、たまに更新される画像情報を用いて目標とのズレを補正するという制御方法を提案しました。
状態推定のオブザーバーとしてカルマンフィルターを用いることにより、精度の向上を図りました。
 Network De...
Network De...