
布把持ビジョングループ
背景と目的
布製品を扱う多くの産業では、まだまだロボットに任せられない作業工程が多く残されており、衛生管理の行き届きやすいロボットシステムの実現が期待されています。そこで、私たちは人手に依存せずに布製品を整列するロボットシステムの構築を目的とし、乱雑に置かれた布製品を整列させるためのビジョンシステム構築を目指しています。
2007年度の成果
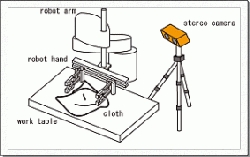
本研究は株式会社IST、平井研究室(立命館大)と2007年度より共同研究としてスタートしました。一年間の研究成果として、ロボットと連携して動作するビジョンシステムを実装することができました。(※2008年度は島田・白井研究室のみで研究しました.)システムは大きくロボット部とビジョン部に分かれており、私たちはビジョン部としてステレオビジョンを用いて布の三次元形状を認識して、ロボットハンドに布を掴ませるための把持箇所を抽出するビジョンシステムを実装しました。
下記の条件を満たす布把持箇所を画像処理で抽出します。
* 布把持箇所の条件
(i) 作業台から布までの高さが1cmを超える直線を除去する
(ii) 実際には直線的に見えるが、細かい布のしわなどによって
分断されてしまった直線同士を結合する
(iii) 直線の長さが6cmより短いものを除去する
(iv) 直線の中でハンドに対する角度が最も緩やかなものを把持箇所とする
布把持箇所を抽出するプロセス (a)~(e)

(a)輪郭線抽出後
(b)直線部抽出後
(c)作業台から布までの高さが1cmを超える直線を除去する
(d)直線的に見えるが、分断されてしまった直線同士を結合した後、長さ6cmより短い直線を除去後
(e)直線部の中でハンドに対する角度が最も緩やかなものを把持箇所とする
 Underwater Vision...
Underwater Vision...