Computer Vision for Food Industry
Background and Purpose
In recent years, food industry has been facing the problem of labor shortage. To mitigate the problem, automatic work via industrial robot has become popular recently. However, differing from the industrial products, food has various size, shape and colors, which is difficult for computer to recognize correctly due to the previous algorithm designed by human.
To automatize food industry, we considered that we can first extract necessary information from images, then using the information to control robots. This research purposes to use deep learning to extract the information which is necessary for controlling robots. In addition, Hirai Lab. uses the information extracted by our model to control robots. This research is a collaboration research with Hirai Lab..
There are two main problems in automatization we are solving.
1.Image Recognition for packing cooked food onto trays.
For controlling robot arm to pack cooked food onto trays, we use deep learning to predict the position where robot arm should grab the food, and where robot arm should put the food onto.
2.Image Recognition for taking a certain amount of tiny decoration for food
For controlling robot arm to pick up a certain amount of tiny decoration for food like corns or green peas from the storage container, we use deep learning to predict the position where robot arm should land on, and the force that robot hand should use.
To collect training data and actual operating the robot in the factory, this research is a collaboration research with Hirai Lab. and certain companies.
Introduction
Ⅰ.Image Recognition for auto-packing(Collab with Fresh Frozen Ajinomoto)
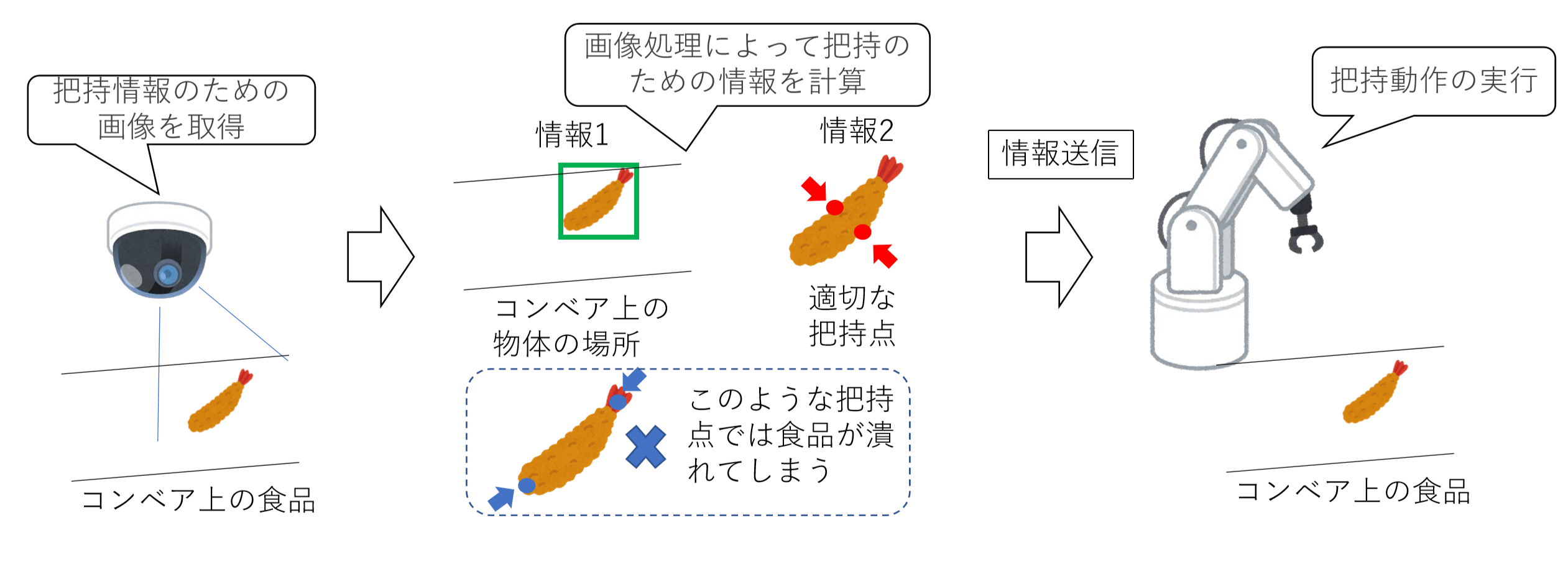
To put food onto the tray properly, the following information is considered necessary.
1. Target food’s position in the image.
2. The proper point to grab that food.
We are trying to predict this information from images using deep learning.