この研究は過去に行われていた研究です。
背景と目的
近年、あらゆるところでロボットが用いられ、それに伴いロボットは大きく進化しています。 元来、ロボットは製造業に用いるために開発されてきました。 なぜなら、人間では困難な 精密作業や反復作業を迅速に行うにはロボットを用いた方が効率がよかったからです。 しかし近年では、製造業ロボットではなく非製造業用ロボット、つまりサービスロボットが 注目を浴びてきています。 本研究で用いているNECのPaPeRoやSONYのAIBOのような家庭用サービスロボットをはじめ、案内用ロボットや警備ロボット、 掃除ロボットなど様々なものが開発されており、ロボットは非常に身近なものになってきました。
これらサービスロボットに求められるものは、『人にとって有益な機能』と 『人と自然なコミュニケーションが取れること』であると思っています。 前者はもちろんのこと、ロボットがいかにも機械的な反応をするのではなく、人と同じような応対ができることで、快適にロボットの機能を利用することができるのではないでしょうか。
現在対話知能班では、上記2点の実現を念頭におき、人に役立つ情報の収集や提供が行えるロボットの開発を目指して研究しています。 具体的には、カメラから人を発見したら、挨拶したり用件を伝える、また自ら移動し特定の相手に用件を伝える、さらには自ら必要な情報を人から聞き出したり、インターネットから収集することができるようなロボットを実現することを目標としています。
研究内容
[1] ロボットが集団内での齟齬を解消するための発話戦略

昨今高度に情報化する中で、インタラクティブに予定管理や館内案内など様々なサービスを提供できる対話システムや対話ロボットが 盛んに研究開発されています。しかし、多くのインタラクティブなシステムはユーザにとって既知の情報を伝えてしまう事や、 急な話題の転換についていけない事などの課題を抱えています。既存研究では、システムにユーザの知識や意図を推定させる、 眼前のユーザに応じた情報提供を行っています。
しかし、完全なユーザモデルを構築できたとしても、自己が持つ情報の一部しか伝えることができない ”情報の遮蔽”が起こり、ユーザ間、ユーザ-ロボット間において齟齬が発生しえます。 この問題は、システムが確実な情報を全て持つ場合において訂正は容易ですが、システム、ユーザ共に確認できる確実な情報がない場合、 齟齬の解消は困難となります。
我々は、不確実かつ部分的な情報しかない中での集団内で発生した齟齬を検知、解消するためのアプローチとして、 情報が遮蔽されていることを前提に、推測したい事象に関して収集した証拠情報からその事象の状態を逐次更新する ユーザの信念モデルをダイナミックベイジアンネットワーク(dynamic Bayesian network: DBN)で記述し、 それを利用した情報収集及び齟齬解消のための発話戦略を研究しています。
[2] ユーザ同士の会話トピックの推定と発話生成
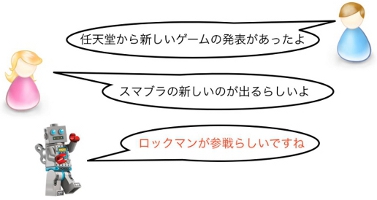
人間同士の会話の目的の一つに情報の共有や伝達があります。しかし、共有及び伝達される情報は、会話参加者の知識の枠を超えず、 全員が知らない可能性のある有益な情報を提供するシステムの開発が期待されています。 ユーザが意識してシステムに問い合わせることで情報を提供するシステムは、Appleの「Siri」やNTT docomoの「しゃべってコンシェル」など 数多く存在しています。
しかし、これらのシステムの入力はユーザ側が予め質問内容などを考え発話しなければなりません。 また、質問内容をユーザ自信が意識的に構築する必要が生じるため、ユーザへの負担が大きいという問題があります。 そこで、本研究では人間同士が会話を行っている最中に、会話の内容を把握した上で、会話を阻害することなく会話に介入することが可能なロボットの開発を 目指しています。
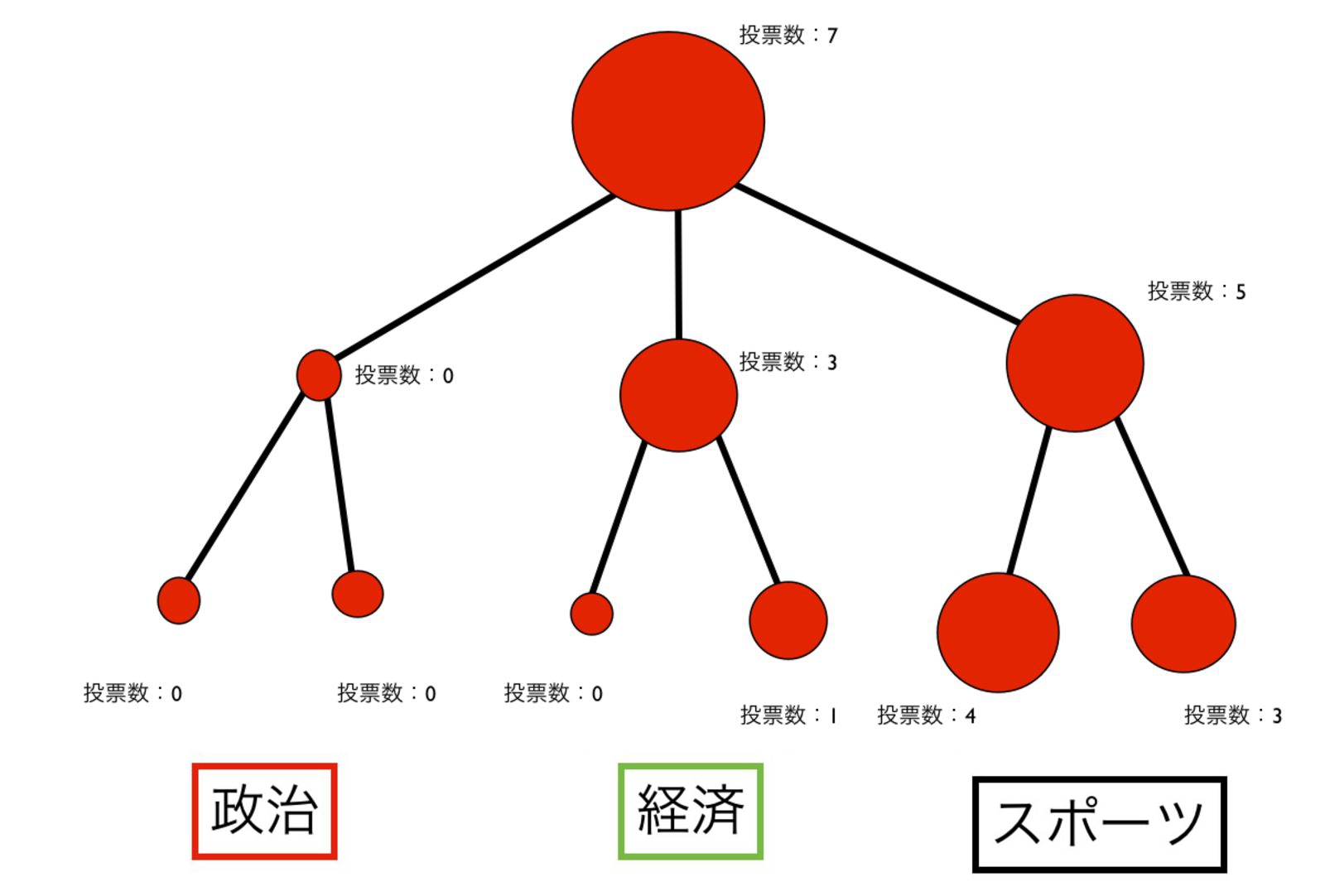
我々の方法では、まずHDP-DLAトピックモデルに基づくドキュメントの階層化クラスタリングを行ってドキュメントのクラスタツリーを作ります。 クラスタツリーのノードごとに、ノードに属するドキュメント共通の単語辞書を生成し、単語辞書をノードとしたツリー型のモデルを提案しています。 ある会話文が入力されると、会話中に発せられた単語が属するノードに票が入り、 ツリーのパスごとにカウントすることで、どの話題の単語が多く発せられたかが分かります。 そこから、発話すべき内容を生成していきます。
[3] ROSを用いたユーザマップ生成による対話型ロボットの開発
本研究では、ロボットを自律移動させユーザ位置情報を可視化したユーザマッピングを作成しサービスを提供するロボット開発を目的とする。 プラットフォームには ROS ( Robot Operating System ) を用いることで、あらゆる情報を ROS ネットワーク上のモジュールと共有する。
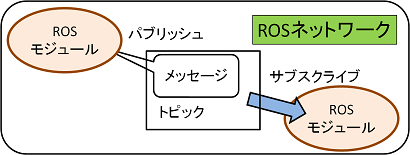
ROSとは
・ ロボットアプリケーション作成を支援するライブラリとツールを提供しているミドルウェア
・ 地図生成したり、自己位置推定を行ったり、自律移動を可能にしたりするモジュールが提供されている
・ ROSのモジュールを作成することで複雑な処理を分散させ、処理した情報(メッセージ)をパブリッシュ/サブスクライブすることでROSネットワーク内で共有することが容易である。
現在の研究
RGB-D センサから取得した画像をもとにデータベースに登録されているユーザを認識すると、研究室の地図上にその名前をマッピングする。 ユーザの名前を指定することでそのユーザを認識した場所へ自律移動するシステムを構築している。
PaPeRoとは
PaPeRoとは、”Partner -Type Personal Robot”の略で、NECで研究開発されている 「人とやりとりをするための基本的な機能を持っているパーソナルロボット」 です。愛知万博でもチャイルドケアロボットとして出展されていました。
